Dzielić:



3 systemy równań liniowych i ich rozwiązywanie
The równania liniowe są równaniami wielomianowymi z jedną lub kilkoma niewiadomymi. W tym przypadku niewiadome nie są wznoszone do mocy, ani też nie są mnożone między sobą (w tym przypadku mówi się, że równanie ma stopień 1 lub pierwszy stopień).
Równanie to matematyczna równość, w której istnieje jeden lub więcej nieznanych elementów, które nazwiemy nieznanymi lub nieznanymi w przypadku, gdy jest ich więcej niż jeden. Aby rozwiązać to równanie, należy ustalić wartość niewiadomych.
Równanie liniowe ma następującą strukturę:
a0· 1 + a1· X1+ a2· X2+... + an· Xn= b
Gdzie0, a1, a2,..., an są liczbami rzeczywistymi, których wartość znamy i nazywamy współczynnikami, b jest również znaną liczbą rzeczywistą, która nazywana jest pojęciem niezależnym. I wreszcie są X1, X2,..., Xn które są znane jako nieznane. Są to zmienne, których wartość jest nieznana.
System równań liniowych to zestaw równań liniowych, w których wartość niewiadomych jest taka sama w każdym równaniu.
Logicznie rzecz biorąc, sposobem rozwiązania układu równań liniowych jest przypisanie wartości do niewiadomych, aby można było zweryfikować równość. Oznacza to, że niewiadome muszą być obliczone tak, aby wszystkie równania systemu zostały spełnione jednocześnie. Reprezentujemy układ równań liniowych w następujący sposób
a0· 1 + a1· X1 + a2· X2 +... + an· Xn = an + 1
b0· 1 + b1· X1 + b2· X2 +... + bn· Xn = bn + 1
c0· 1 + c1· X1 + c2· X2 +... + cn· Xn = cn + 1
... .
d0· 1 + d1· X1 + d2· X2 +... + dn· Xn = dn + 1
gdzie a0, a1,..., an,b0,b1,..., bn ,c0 ,c1,..., cn itd. nam prawdziwe liczby i niewiadome do rozwiązania to X0,..., Xn ,Xn + 1.
Każde równanie liniowe reprezentuje linię, a zatem układ równań N równań liniowych reprezentuje N prostego narysowanego w przestrzeni.
W zależności od liczby niewiadomych, które ma każde równanie liniowe, linia reprezentująca to równanie będzie reprezentowana w innym wymiarze, to znaczy równaniu o dwóch niewiadomych (na przykład 2 · X1 + X2 = 0) reprezentuje linię w przestrzeni dwuwymiarowej, równanie z trzema niewiadomymi (na przykład 2 · X1 + X2 - 5 · X3 = 10) byłby reprezentowany w trójwymiarowej przestrzeni i tak dalej.
Podczas rozwiązywania układu równań wartości X0,..., Xn ,Xn + 1 zdarzają się punkty cięcia między liniami.
Rozwiązując układ równań możemy wyciągnąć różne wnioski. W zależności od rodzaju uzyskanego wyniku możemy rozróżnić 3 typy układów równań liniowych:
1- Kompatybilność nieokreślona
Chociaż może to brzmieć jak żart, możliwe jest, że próbując rozwiązać układ równań, dojdziemy do oczywistości stylu 0 = 0.
Ten typ sytuacji występuje, gdy istnieją nieskończone rozwiązania dla układu równań, a to się dzieje, gdy okazuje się, że w naszym układzie równań równania reprezentują tę samą linię. Możemy to zobaczyć graficznie:
Jako system równań przyjmujemy:
Dzięki rozwiązaniu dwóch równań z 2 niewiadomymi możemy przedstawić linie w płaszczyźnie dwuwymiarowej
Jak widzimy linie z tym samym, wszystkie punkty pierwszego równania pokrywają się z punktami drugiego równania, dlatego ma tyle punktów cięcia, ile punktów ma linia, czyli nieskończoność.
2- Niezgodne
Czytając nazwę możemy sobie wyobrazić, że nasz następny układ równań nie będzie miał rozwiązania.
Jeśli spróbujemy rozwiązać na przykład ten układ równań
Graficznie byłoby to:
Jeśli pomnożymy wszystkie warunki drugiego równania, otrzymamy, że X + Y = 1 równa się 2 · X + 2 · Y = 2. A jeśli to ostatnie wyrażenie zostanie odjęte od pierwszego równania, otrzymamy
2 · X-2 · X + 2 · Y -2 · Y = 3-2
Albo to samo
0 = 1
Gdy jesteśmy w tej sytuacji, oznacza to, że linie reprezentowane w układzie równań są równoległe, co oznacza, że z definicji nigdy nie są cięte i nie ma punktu przecięcia. Gdy system jest prezentowany w ten sposób, mówi się, że jest niespójny, niezależny.
3- Określone wsparcie
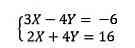
W końcu dochodzimy do przypadku, w którym nasz układ równań ma jedno rozwiązanie, w którym mamy linie, które przecinają się i generują punkt przecięcia. Zobaczmy przykład:
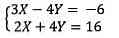
Aby go rozwiązać, możemy dodać dwa równania, abyśmy je uzyskali
(3 · X-4 · Y) + (2 · X + 4 · Y) = -6 + 16
Jeśli uprościmy, odeszliśmy
5 · X + 0 · Y = 5 · X = 10
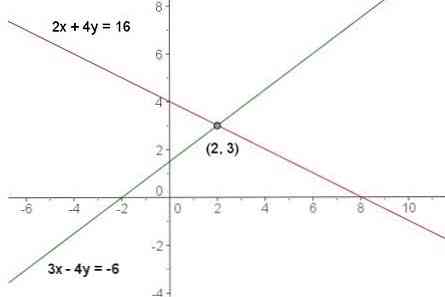
Z czego łatwo wywnioskować, że X = 2 i podstawienie lub X = 2 w dowolnym z oryginalnych równań otrzymujemy Y = 3.
Wizualnie byłoby to:
Metody rozwiązywania układów równań liniowych
Jak widzieliśmy w poprzedniej sekcji, dla systemów z 2 niewiadomymi i 2 równaniami, opartych na prostych operacjach, takich jak dodawanie, odejmowanie, mnożenie, dzielenie i podstawianie, możemy je rozwiązać w ciągu kilku minut. Ale jeśli spróbujemy zastosować tę metodologię do systemów z większą liczbą równań i więcej niewiadomych, obliczenia stają się nużące i możemy łatwo popełnić błąd.
Aby uprościć obliczenia, istnieje kilka metod rozwiązywania, ale niewątpliwie najbardziej rozpowszechnione metody to Reguła Cramera i eliminacja Gaussa-Jordana..
Metoda Cramera
Aby wyjaśnić, w jaki sposób stosowana jest ta metoda, należy wiedzieć, jaka jest jej macierz i wiedzieć, jak znaleźć jej wyznacznik, zróbmy nawias, aby zdefiniować te dwie koncepcje.
Jeden macierz to nic innego jak zbiór liczb lub symboli algebraicznych umieszczonych w linii poziomej i pionowej i ułożonych w formie prostokąta. Dla naszego tematu użyjemy macierzy jako bardziej uproszczonego sposobu wyrażania naszego układu równań.
Zobaczmy przykład:
Będzie to układ równań liniowych
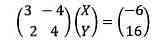
Ten prosty układ równań, który możemy podsumować, to działanie dwóch macierzy 2 × 2, które daje matrycę 2 × 1.
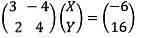
Pierwsza macierz odpowiada wszystkim współczynnikom, druga macierz to nieznane do rozwiązania, a macierz znajdująca się po równości jest identyfikowana z niezależnymi warunkami równań
The wyznacznik jest operacją stosowaną do macierzy, której wynikiem jest liczba rzeczywista.
W przypadku macierzy, którą znaleźliśmy w naszym poprzednim przykładzie, jej wyznacznikiem byłoby:

Po zdefiniowaniu koncepcji macierzy i wyznacznika możemy wyjaśnić, na czym polega metoda Cramera.
Dzięki tej metodzie możemy łatwo rozwiązać układ równań liniowych, o ile system nie przekracza trzech równań z trzema niewiadomymi, ponieważ obliczenie wyznaczników macierzy jest bardzo trudne dla macierzy 4 × 4 lub wyższych. W przypadku posiadania systemu z więcej niż trzema równaniami liniowymi, zaleca się metodę eliminacji Gaussa-Jordana.
Kontynuując poprzedni przykład, za pomocą Cramera musimy po prostu obliczyć dwa wyznaczniki, a dzięki niemu znajdziemy wartość naszych dwóch niewiadomych.
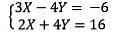
Mamy nasz system:
I mamy system reprezentowany przez macierze:
Znaleziono wartość X:
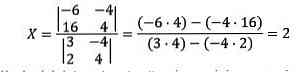
Po prostu w obliczeniu wyznacznika znajdującego się w mianowniku podziału, zastąpiliśmy pierwszą gminę macierzą niezależnych terminów. W mianowniku podziału mamy wyznacznik naszej pierwotnej macierzy.
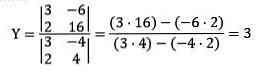
Wykonując te same obliczenia, aby znaleźć Y, otrzymujemy:
Eliminacja Gaussa-Jordana
Definiujemy rozszerzona macierz do macierzy wynikającej z układu równań, w którym dodajemy niezależne terminy na końcu macierzy.
Metoda polegająca na eliminacji Gaussa-Jordana polega na przekształceniu naszej rozszerzonej macierzy na znacznie prostszą macierz, za pomocą operacji między rzędami macierzy, w której mam zera we wszystkich polach, z wyjątkiem przekątnej, gdzie muszę je uzyskać. W następujący sposób:

Gdzie X i Y byłyby liczbami rzeczywistymi odpowiadającymi naszym niewiadomym.
Rozwiążmy ten system, eliminując Gaussa-Jordana:



Udało nam się już uzyskać zero w lewej dolnej części naszej macierzy, następnym krokiem jest uzyskanie 0 w górnej prawej części.


Osiągnęliśmy 0 w lewym górnym rogu macierzy, teraz musimy tylko przekonwertować przekątną na jedynkę i już rozwiązaliśmy nasz system Gauss-Jordan.
Dlatego dochodzimy do wniosku, że:

Referencje
- vitutor.com.
- algebra.us.es.
- Układy równań liniowych (bez daty). Odzyskane z uco.es.
- Układy równań liniowych. Rozdział 7. (niedatowany). Pobrane z sauce.pntic.mec.es.
- Algebra liniowa i geometria (2010/2011). Układy równań liniowych. Rozdział 1. Wydział Algebry. Uniwersytet w Sewilli. Hiszpania Odzyskany z algebra.us.es.